Description Projet
Introduction
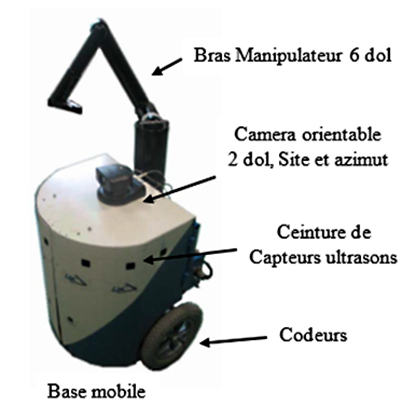
ARPH est un robot manipulateur mobibe semi-circulaire de soixante centimètres de large et soixante centimètres de haut. Dimensions sont compatibles avec une utilisation en intérieur. La partie mobile du robot possède 2 degrés de liberté. Les 2 moteurs sont pilotés par le système de contrôle de marque DX largement diffusé dans les fauteuils roulants électriques car fiable et facile à maintenir. Différents types de capteurs sont utilisés. Un capteur à l’estime donne la position relative du robot. Des capteurs à ultrasons permettent d’éviter les obstacles. Une caméra vidéo orientable en site et azimut motorisée donne à l’opérateur les retours informations en retour. Elle est également utilisée pour la localisation autonome. Le bras manipulateur embarqué est un bras MANUS à 6 degrés de liberté.